基于离散视锥理论的无人机烟幕遮蔽策略优化
项目围绕“无人机协同投放烟幕弹干扰导弹观测”的五问任务展开,形成了从 离散视锥遮蔽判定到 MISOCP 与并行启发式优化 的完整建模链路。 在统一约束框架下,得到问题一至问题五的关键遮蔽时长结果: 1.405 s / 4.665 s / 6.712 s / 11.630 s / 26.954 s。
摘要
本项目针对“导弹持续观测下的真目标遮蔽”问题,构建了可计算、可扩展的多机协同优化框架。 核心做法是将连续视锥转化为离散视线集合,利用烟幕球心到视线段最短距离进行“完全遮蔽”判定, 再在单机单弹、单机三弹、三机单弹、五机多弹等场景中引入网格并行搜索与混合整数二阶锥规划, 最终在多约束条件下实现总遮蔽时长提升。
赛题背景与个人职责
赛题核心目标
在导弹飞向假目标的过程中,通过无人机投放烟幕干扰弹,使真目标在尽可能长时间内处于“完全遮蔽”状态。
多层任务递进
从问题一的单弹时长计算,逐步扩展到问题五的五机多弹多导弹协同调度,决策维度与耦合复杂度持续提升。
本人承担工作
担任团队负责人,负责建模主线设计、关键推导、Python 求解程序实现、结果校验与完整论文文本统稿。
工程化输出
将判定模块、搜索模块、可视化模块串联为统一流水线,支持参数灵敏度分析、方案对比与结果复现实验。
方法框架
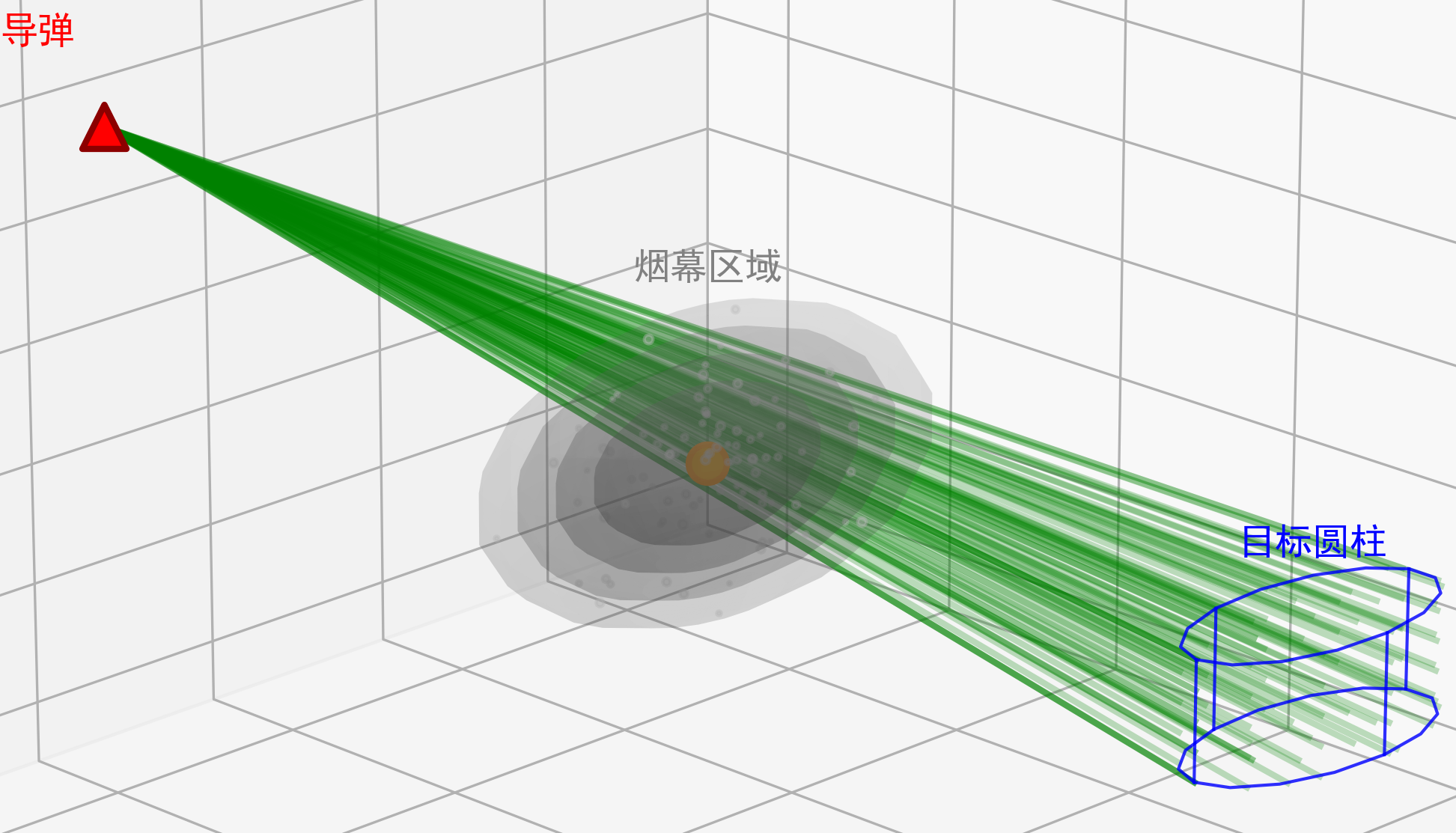
离散视锥遮蔽判定
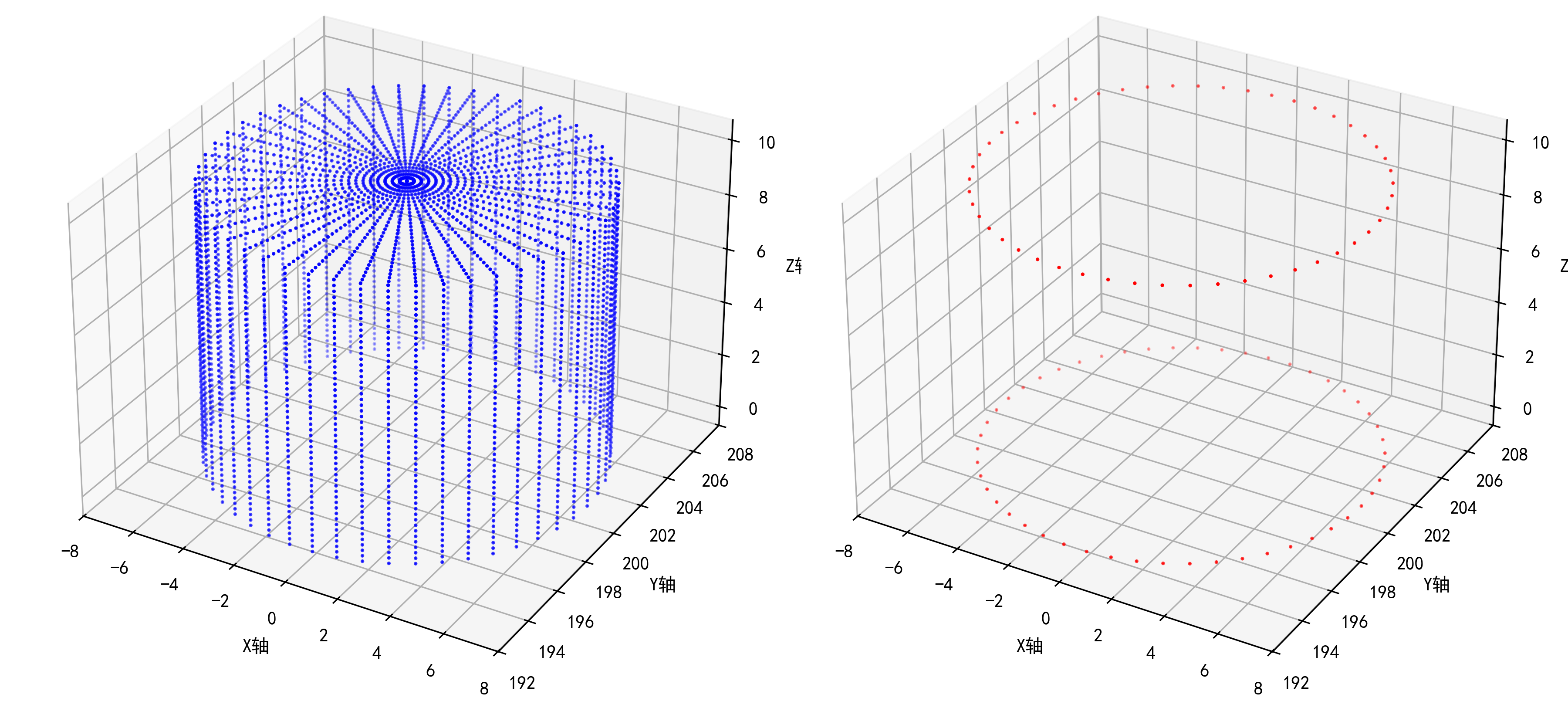
将导弹到目标圆柱体的连续观测射线离散化,基于“烟幕球心到视线段最短距离 ≤ 有效半径”判断单时刻是否完全遮蔽。
粗细网格并行搜索
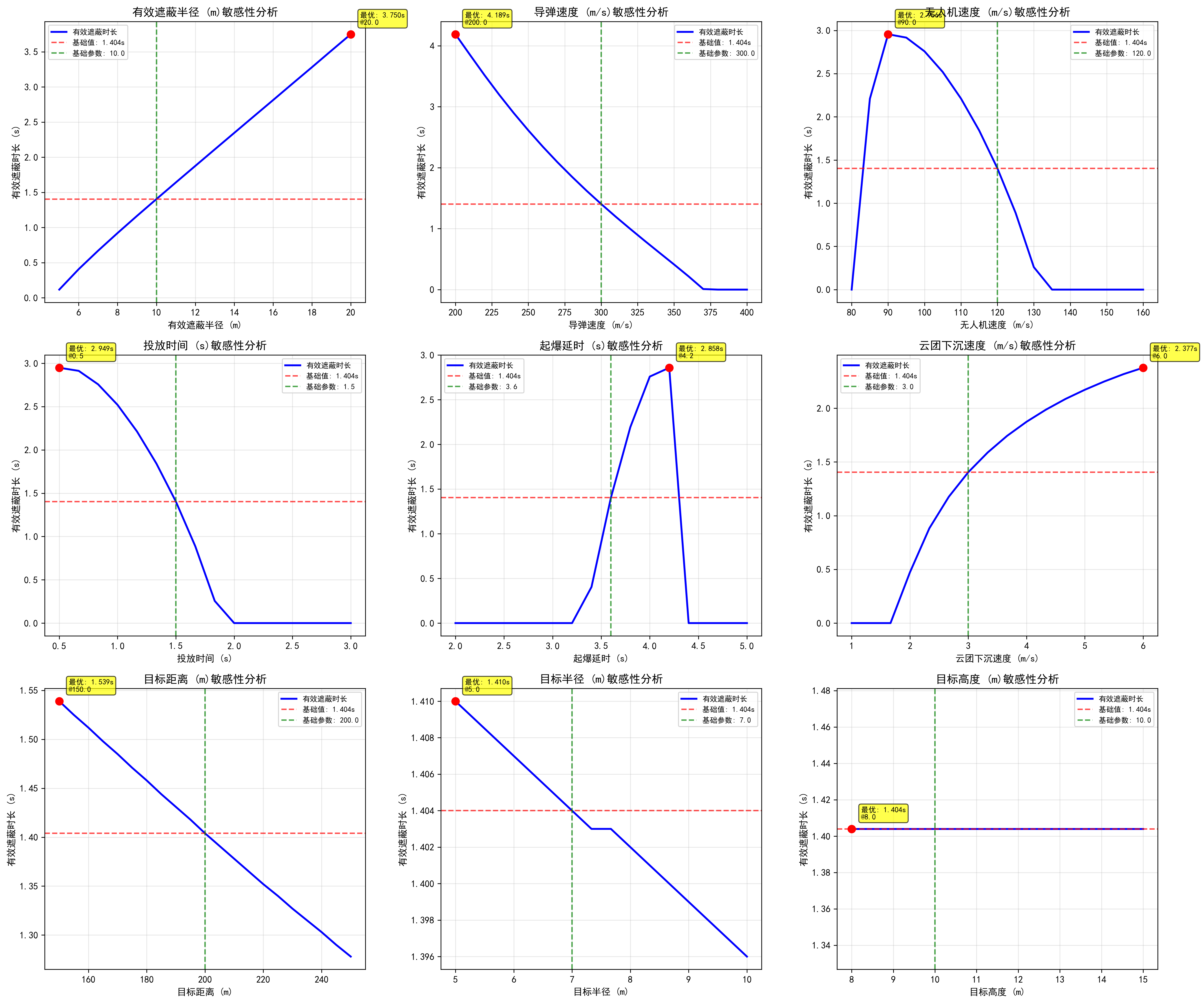
对航向角、速度、投放时刻、引信延时等变量进行粗搜与细搜两级优化,并通过多进程并行加速候选解筛选。
MISOCP 统一建模
在问题三至问题五中,将“至少一枚烟幕生效”“全部视线被遮蔽”等逻辑约束转化为混合整数二阶锥规划求解。
贪心排程与联合组合
固定航向与速度后,通过三弹贪心排程和多机 Top-K 方案笛卡尔组合,最大化联合遮蔽区间并集总时长。
五问结果总览
下面汇总论文中的五问关键指标与代表性参数。相关数值均摘自竞赛论文最终版本,并与提交稿保持一致。
| 问题 | 目标与方法 | 关键结果 | 代表性参数/结论 |
|---|---|---|---|
| 问题一 | 单机单弹有效遮蔽时长计算;离散视锥模型建立与时间离散(黎曼和积分)求解 | 1.405 s | 0.001 s 步长;17640 条视线离散,简化采样与全采样结果一致 |
| 问题二 | 单机单弹遮蔽时长最大化;粗细网格最优化策略与工程解决上的并行搜索 | 4.665 s | 最优参数:航向角 178.20°,速度 105.00 m/s,投放 0.00 s,引信延时 3.00 s |
| 问题三 | 单机三弹协同;MISOCP(二阶锥约束模型)与贪心排程 | 6.712 s | 单弹自身遮蔽:2.952 s / 2.672 s / 1.297 s,联合后连续遮蔽增强 |
| 问题四 | 三机单弹协同;分层并行搜索与组合优化 | 11.630 s | FY1/FY2/FY3 单独最优遮蔽分别为 4.580 s / 3.970 s / 3.110 s |
| 问题五 | 五机多弹多导弹协同;全局汇总与贪心调度 | 26.954 s | FY1、FY2、FY3、FY5 协同;FY4 因性价比较低未投入 |
关键图示
以下按论文逻辑展示 7 张核心图示,包括建模的示意图,计算结果的烟幕弹/无人机排程图;点击图片可放大查看细节。
模型评价
优势一:几何与物理统一
将导弹、无人机、烟幕的运动学演化与几何遮蔽判定融合,保证模型具有可解释性与可计算性。
优势二:求解效率可控
通过粗细网格、早停机制与并行计算,在高维参数空间中快速获得高质量近似最优方案。
优势三:协同场景可扩展
从单机单弹到五机多弹复用统一框架,体现了方法在多机协同与多目标调度中的迁移能力。
局限:全局最优与动态适应性
网格搜索存在局部最优风险,且模型基于固定初始条件与匀速假设,对强动态扰动场景仍需在线修正机制。
论文资源
若浏览器无法直接预览 PDF,可使用“新窗口打开”按钮。